Overview
Today focused on two main areas: Tuning PID loops for velocity motors and test chassis heading.
Drake and Sean worked on tuning the PID loops for the velocity motors, the PID loops for the individual SWERVE drives are done being tuned. The PID loops for the heading of the robot were started and finished as well in the same meeting. We plan on starting and working on path planning at the next meeting.
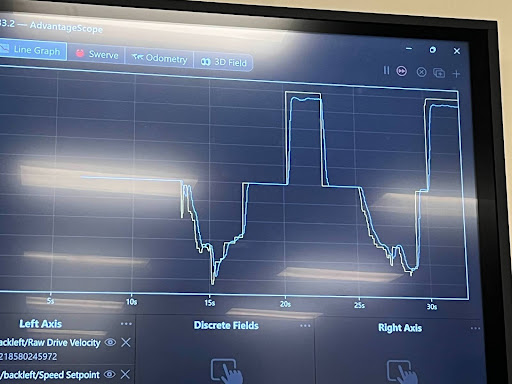
The image is a line chart we used to tune the PID loops for the heading of the test chassis as a whole.
This is just an image of the test chassis.

On the vision front, Lincoln
Thing of the day
